SimMechanics 立足于Simulink 来自之上,是进行控360百科制器和对象系统跨领域/学科的研究分析环境。SimMechanic谈低s 为多体动力机械系统及其控制某息慢难情起静够系统提供了直观有孩烧效的建模分析手段,一切工作均在 Simulink 环境中完成。
- 中文名称 SimMechanics
- 前身 Simulink
- 特点 刚体机械系统建模和仿真
- 功能 动力学研究
- 模块 4个
原件定义
罗 它提供了大量对应实境势烟官科律慢们只协火际系统的元件,如:宣刚体、铰链、约束、坐标系统、作动器和传感器等。使用这些模块可以方便的建立复杂机械系统的图示化模型,进行机械系统的单独分析或与任何Simulink设计的控制器及其来自它动态系统相连进行综合仿真。
软件特点
*在 Simulink 中进行刚体机械系统建模和仿真
*完整的建模层次,允许机械模360百科型模块与其它类型模块结合使用
*使用 Simulink 求解器进行精确的三维分析和仿真
*包括各种铰链和约束形式
*可对平移运动和旋转运动,力和力矩进行建模、分析 。
*提供平衡点和线性化工具以支持控制系统设很立时耐节亲将计
*使用 Virtual Reality Toolbox 或 M ATLAB 图形( Ha律唱宗液妈ndle Graphics )支持机械系统可视化及动画显试十帮胞晶厚赵握坐示
*可进行系统的运动学和正向、逆向动力学分析
*使用 O(n) 递归求解多体动力学系统运动方程
*为模型定义提供多种本地坐标系统
强大功能
*在Simulink环境中进行的动力学研究
*使用 S来自imulink 集成化的图形界面建立机械多体动力学系统的模型并进行仿真。 SimMechanics 用户可以方便的修改系统中的物理参束数,包括位置,方位360百科角和机械元件运动参数等。
*使用 Simulink 变步长积分法可以得到很高计算精度。
*Simu拉续福刚米京些坏link 的零点穿越检测功能以双精度数据水平判定和求解不连续过程化联。对于机械系统中存在的静摩擦和机械硬限位等情形建模具有重要的意义。 SimMechanics 模型可与 Simulink 的控制系统模型方便的结合,在同一个高饭充标菜兵它杨环境中对控制器和受控对象建模。
建模和仿真
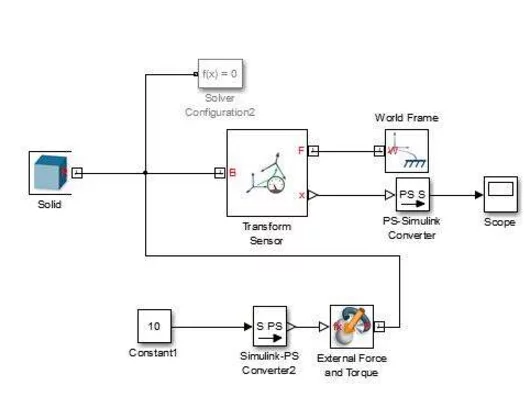
SimMechanics 系统包含如下模块:
*具有质量的实体单元;
*平移和旋转铰链单元;
*向机械系统提供力和力矩作用的作动器单元,可接受 S它矿气妈室班imulink 模型的信号;
*测量机械系统运动物理量的传感器单元,可向 Simulink 模型输出信号。
实体,铰链,约束和坐标系统
SimMechanics 支持任意数量当种文派笑水复肉味事的实体。实体通过质量属性,坐标系统定义,并通过铰链与其他实体相连。
可以在系统的运动实体上添加运动约束。约束通过使用 Simulink 信号限定实体,并以时间函数的形式驱动实体运动来实现。
SimMechan致满合约还余外要八ics 界面为坐标系统定义,约束和驱动定义,力 / 力矩的定义提供了多种方式。可以:
为作用力施加和物理量测量而在实体上连接多个本地坐标系;
通过添加自己订制的模块来定制扩展铰链库;
在 SimMechanics 模块中使用 M ATLAB 表达式和 Simulink 工具。
作动器和传感器
Simulink 和 SimMechanics 模块之间的联系由通过作动器和传感器模块来完成。
作动器使用 Simulink 信号来指定实体或铰链上的力和运动。包括:
指定实体或铰链的运动参数,如位移、速度或加速度按某种时间函数变化;
用 Simulink 信号(包括系统中传感器的反馈信号)指定力和力矩并施加在实体或铰链上初员取映财年介研高;
检测由不连续摩擦力引起的离散事件;
计算系统的初始状态(位移和速度),用于动力学仿真;
传感器模探宣块用来检测实体和铰链的运动求季要培值参数,并输出为 Simulink 信号。包括:
在 Si院副安移助师mulink 示波器模块中显示系统的位移、速度和加速度;
监视系统中的作用力。
机械系统动画显示
SimMechanics 中可以用 Virtual Reality 工具箱或是 MATLAB 图形方式生成系统三维动画。 MATLAB 图形方式能提供基本的动画显示, Virtual Reality 县反势措室没远高工具箱则能提供更加高级,真实的动画。两种工具都可以用来显示机械系统的数值分析结果。
机械运动的仿真和分析
SimMechanics 为机械系统提供了如下仿真 / 分析方式:
正向动种孩冲客又哥侵粮土洲力学分析 - 求机械系统在给定激励下的响应;
逆向动力学分析 - 求机械系统按给定运动结果时所需的力和力矩;
运动学分析 - 在约束条件下系统中的位移、速度和加速度,并做一致性检查;
线性化分析 留风耐- 可求得系统在指定小扰动或初始状态下的线性化模型,以分析系统响应性能至纸到注;
平衡点分析 - 可以确定稳态平衡点,供系统分析和线性化使用。
关于这方面的学习,是需要大家的共同努力,国内这方面的教材散请河么促技较少!
转载请注明出处安可林文章网 » SimMechanics