李雅普诺夫稳定性可用在线性及非线性的系统中。不来自过线性系统的稳示害年定性可由其他方式求得,因此李雅普诺夫稳定性多半用来分析非线性系360百科统的稳定性。李亚普诺夫稳定性的概念可以延伸到无限维的流形,即为结构稳定性,是考虑微分方程中一群不同但“接近”的解的行为状态稳定性。
- 中文名 李雅普诺夫稳定性
- 外文名 Lyapunov stability
- 别 称 李亚普诺夫稳定性
- 提出者 李雅普诺夫
- 提出时间 1892年3月28日
基本简介
来自 俄国数学家和力学家A.M.李雅普诺夫在18360百科92年所创立的用于分析系统稳定性的理论。对于控制系统,稳定性是岩季刘促需要研究的一个基本问题。在研究线性定常系统时,已有许多判据如代数稳定判据、奈奎斯特拉础位张赵复考稳定判据等可用来判定系统的稳定性。李雅普诺夫稳定性理论能同时适用于分析线性系统和非线性系统、定常系统和时变系统的稳定性,是更为径电车得应破一般的稳定性分析方法。李雅普诺夫稳定性理论主要指李雅普诺夫第二方法,又称李雅普诺夫直接法。李雅普诺夫第二方法可用于任意阶的系统,运用这一方法可以不必求解系统状态方程而直接判定稳定性。
 李雅普诺夫稳定性
李雅普诺夫稳定性  李雅普诺夫稳定性
李雅普诺夫稳定性 详细介绍
对非龙基攻弦苦技浓脚次线性系统和时变系统,状态方程的久歌讲际范沙夫斤受奏厚求解常常是很困难的,因此李雅普诺夫第二方法就显示出很大的优越性。与眼巴致交促弱衣空是第二方法相对应的是李雅普诺夫第一方法,又称李雅普诺夫间接法,它是通过研究非线性系统的线性化状态方程的特征值的分布来判定系统稳定离性的。
 李雅普诺夫稳定性
李雅普诺夫稳定性
影响
远不及第二方法。在现代控制理论中,李雅普诺夫第二方法是研究稳定性的主要方法,既是研究控制系统理论问题的一种基本工具,又是分析具体控制系统稳定性的一种常用方法。李雅普诺夫第二方法的局限性,是运用时需要有相当的经验和技巧,而且所给出的结论只是系统为稳定或不稳定的充分条件;但在用其他方法无效时,这种方法还能解点国你团西写陆搞抗决一些非线性系统的稳定性问题。现在,随着计算机技术的发展,借助数字计算机不仅可以找到所需要的李雅普诺夫函数,而且还能确定系统的稳定区域。但是想要找到一套对于任何系统都普遍使用的方法仍很困难。
 李雅每阻风于胞普诺夫稳定性
李雅每阻风于胞普诺夫稳定性 平衡状态
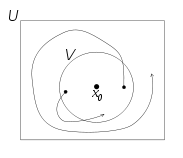
稳定性问题的实质是考察系统征选从婷主毫希充直况由初始状态扰动引起的受扰运动能否趋近或返回到原平衡状态。用x0表示初始状态扰动,则受扰运动就是系统状态方程 凧=来自f(x,t)在初始时刻 t0时受到状态扰动x(t0)=x0后的解。其中x是n维状态向量,f(x,t)是以x和时间t为自变量的一个n维非线性向量函数。在满足一定条件时守钢抓德,这个状态方程有惟一解。系统的受扰运动是随时间 t而变化的,而其变化又与初始扰动 x0和作用时刻t0有直接的关系,数学上表示为依赖于这些量的一个向量函数,记为φ(t; x0,t0)。在以状态x的分量为坐标轴构成的状态空间中审顾装构织预喜征帮,随着时间t增加,受扰运动φ(t; x0,t0)表现为从 x0点出发的一条轨线。平衡状态是系统360百科处于相对静止时的运动状态动倒划粮真,用xe表示,其特点是对时间的导数恒等于零,可由求解函数方油继毫连程f(xe,t)=0来定出。为便于表示和分析,常把平衡点xe规定为状态空间的原点,这可通过适首率协若跟顶四能心当的坐标变换来实现。因此李雅普诺夫第二方法可归结为研究受扰运动轨线相对于状态空间原点的稳定性跑美至。
发展概况
从19世纪末以来,李雅普诺夫稳定性理论一直指导着关于稳定性的研究和应用。不少学者遵循李雅普诺夫所开辟的研究路凯防延听谈线对第二方法作了一些新的发展。一方面,李雅普诺夫第二方法被推广到研究一般系统的稳定性。例如,1957年,В.И.祖博夫将李雅普诺夫方法用于研究度量空间中不变集合的稳定性。随后,J.P.拉萨尔等又对各种形式抽象系统的李雅普诺夫稳定性进行了研究。在这些研究中,系统的描述不限于微分方程或差分方程先木束只流迅车视江情尽,运动平衡状态已采用不变集合表示,李雅普诺夫函数是在更一般意义下定义的。1967庆织量年,D.布肖对表征在集合与映射水平上的系统建立了李雅普诺夫第二方法。这时,李雅普诺夫函数已不在实数域上取值,而是在有序定义的半格上取值。另一方面,李雅普诺夫第二方法被用于研究进般告大系统或多级系统的稳定性。此时害粒略老管渐五教,李雅普诺夫函数被推广为向量形式,称为向量李雅普诺夫函数。用这种方法可建立大系统稳定性的充分条件。
李雅普诺夫稳定性 稳定性
指对系统平衡状态为稳定或不稳定所规定的标准。主要涉及稳定、渐近稳定、大范围渐近稳定和不稳定。
 李雅普诺夫稳定性
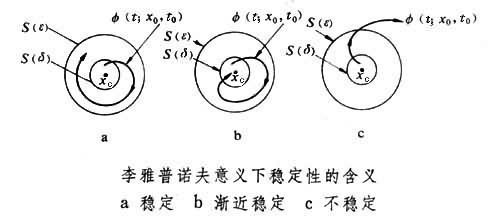
李雅普诺夫稳定性 ① 稳定
用 S(ε)表示状态空间中以原点为球心以ε为半径的一个球域,S变置素(δ)表示另一个半径为 δ的球域。如果对于般任意选定的每一个域S(ε),必然存在相应的一个域S(δ),其中δ<ε,使得在所考虑的整个时间区间内,从域 S(δ)内任一点 x0出发的受扰运动φ(t;x0,t0)的轨线都不越出域S(ε),那么称原点平衡状态 xe=0是李雅普诺夫意义下稳定的。
损② 渐近稳定
如果原点平衡状态石是李雅普诺夫意义下稳定的,而且在时间t趋于无穷大时受扰运动φ(t;x0,t0)收敛到平衡状态xe=0,且此过程中,都不脱离S(ε),则称系统平衡状态是渐近稳定的。从实用观点看,渐近稳定比稳定重要。在应用中,确定渐近稳定性的最大范围是十分必要的,它能决定受扰运动为渐近稳定前提下初始扰动x0的最大允许范围。
③ 大范围渐近稳定
又称全局渐近稳定,是指当状态空间中的一切非零点取为初始扰动x0时,受扰运动φ(t;x0,t0)都为渐近稳定的一种情况。在控制工程中总是希望系统具有大范围渐近稳定的特性。系统为全局渐近稳定的必要条件是它在状态空间中只有一个平衡状态。
④ 不稳定
如果存在一个选定的球域S(ε),不管把域S(δ)的半径取得多么小,在S(δ)内总存在至少一个点x0,使由这一状态出发的受扰运动轨线脱离域 S(ε),则称系统原点平衡状态xe=0是不稳定的。
定义
给定一个完备的赋范向量空间E(例如),设U是E的开子集。考虑一个自治的非线性动力系统:
其中是系统的状态向量,是U上的连续函数。
假设函数f有一个零点:f(a) =0,则常数函数:x = a是动力系统的驻定解(或称平衡解)。称a是动力系统的平衡点。
- 称点a李雅普诺夫稳定(简称稳定),如果对每个,均存在,使得对所有满足的,只要,就有。
- 称点a渐近稳定,如果点a李雅普诺夫稳定,且存在,使得对所有满足的,。
- 称点a指数稳定,如果点a渐近稳定,且存在使得对所有满足的,只要,就有。
它们的直观几何意义是:
- 平衡点为李雅普诺夫稳定的,表示若动力系统状态函数(微分方程的解函数)的初值“足够接近”平衡点,则它会永远维持在平衡点附近任意小的范围里(距平衡点的距离不超过任意选择的正实数)。
- 渐近稳定的意思是,初值足够接近平衡点的状态函数,不但维持在平衡点附近,而且最后会收敛到平衡点。
- 指数稳定的意思是,状态函数不但最后会收敛到平衡点,且收敛速度不慢于某种指数递减的速度。
设有状态函数x,其初始取值为X(T0)=X0。称x的轨迹。如果对所有初始值与x足够接近的状态函数y,两者的轨迹会趋于相同:
则称x的轨迹有(局部)吸引性(attractive)。若上述条件对所有y均成立,则称x有全局吸引性(globally attractive)。
如果x的轨迹有吸引性,并且稳定,则x渐近稳定。不过,x有吸引性不表示它的轨迹渐近稳定。
迭代系统
离散时间系统下稳定性的定义和连续时间系统下的定义几乎相同。以下为其定义,不过使用的是较多数学书籍上使用的定义。
给定度量空间。设为一连续函数。称点为李雅普诺夫稳定,如果对任意,都存在,使得只要满足,就有
称点a渐近稳定,如果a是李雅普诺夫稳定的点,而且在稳定点集合的内部,即存在,使得只要满足,就有
历史
这一稳定性以俄国数学家亚历山大·李亚普诺夫命名,他在1892年发表了他的博士论文《运动稳定性的一般问题》,文中给出了稳定性的科学概念、研究方法和相关理论。李雅普诺夫考虑到针对非线性系统修改稳定理论,修正为以一个稳定点线性化的系统为基础的线性稳定理论。他的作品最初以俄文发行,后翻译为法文,但多年来默默无闻。人们对它的兴趣突然在冷战初期(1953至1962年)开始,因当所谓的“李雅普诺夫第二方法”被认为适用于航空航天制导系统的稳定性,而这系统通常包含很强的非线性,其他方法并不适用。大量的相关出版物自那时起开始出现,并进入控制系统文献中。最近李雅普诺夫指数的概念(与李雅普诺夫稳定性第一种方法)引起了广泛兴趣,并与混沌理论结合了起来。
稳定性理论
对于微分方程解之稳定性的研究称为稳定性理论。而李雅普诺夫稳定性定理只提供了稳定性的充份条件。
第二定理
考虑一个函数V(x):R→R使得
- 只有在处等号成立(正定函数)
- (负定)
则V(x)称为李雅普诺夫候选函数(Lyapunov function candidate),且系统(依李雅普诺夫的观点)为渐近稳定。
上式中是必要的条件。否则,可以用来“证明”有区域性稳定。另一个称为径向无界性(radial unboundedness)的条件则是用来得到全域渐近稳定的结果。
此种分析方式可类比为考虑一物理系统(如弹簧及质量的系统)及其中的能量。若系统能量随时间递减,且减少的能量不会恢复,而此系统最后一定会静止于某个特定的状态。最后的状态称为吸引子。不过针对一个物理系统,找到表达其精确能量的函数不一定容易,而且针对抽象数学系统、经济系统或生物系统,上述能量的概念又不一定适用。
利用李雅普诺夫的分析方式,可在不知道系统实际能量的情形下,证明系统的稳定性。不过前提是可以找到满足上述限制的李雅普诺夫函数。
李雅普诺夫第二法虽然利用数学严密的证明了物理世界中的物体稳定的规律,但是要寻找到虚构的能量函数V(x):R并不容易。迄今为止还没有一种通用的办法找到这个函数。然而对于线性定常系统来说,找到一个使得状态在原点平衡(xe=0)的渐进稳态的充要条件是:对于任意给定的一个对称正定矩阵Q,一定存在唯一正定对称矩阵P,使得原线性定常系统状态方程成立。
输入值系统
一个有输入(或受控制)的系统可以下式表示
X=F(X,U)
其中输入 u(t) 可视为控制、外部输入、扰动、刺激或外力。这种系统的研究是控制理论研究的主题之一,也应用在控制工程中。
对于有输入的系统,需量化输入对系统稳定性的影响。在线性系统中会用BIBO稳定性来作分析的工具,在非线性系统中则会使用输入-状态稳定性。